At present, many smart phones have joined 3D technology, and a very important route of 3D technology is ToF, and major mobile phone manufacturers have corresponding models. About the principle of ToF camera, there have been many articles introduced before, today we will talk about the calibration that is very important for ToF camera.
The ToF camera obtains distance information, that is, depth information, and the accuracy of depth needs to be calibrated to ensure. ToF calibration generally requires the following types of calibration
Lens calibration
Temperature calibration
Non-linear calibration
Common deviation calibration
Pixel-by-pixel calibration
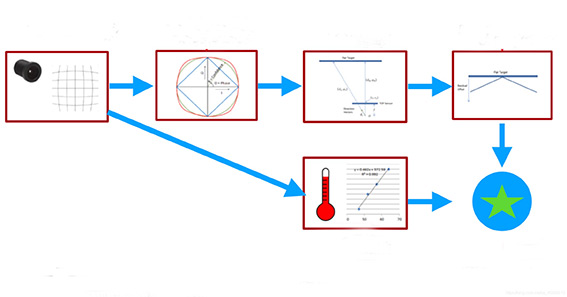
As shown in the figure above, the 4 calibrations in the upper row are prioritized and proceed in the order of the arrows. Lens calibration is the basis of all calibrations and needs to be done first. Non-linear calibration and common-bias calibration can be combined together to improve efficiency; pixel-by-pixel calibration is performed at the end. The temperature calibration target finds the linear relationship coefficient of the change in the depth information that is caused by the temperature change. Since the temperature calibration has no effect on other calibrations, it can be performed at any time. In addition, if the modulation frequency of the light source of the ToF camera is modified, the calibration procedures above except for the lens calibration need to be re-implemented.